
-
AutoMap - Entwicklung eines robusten Positionierungssystems für autonome Fahrzeuge auf der Grundlage erfasster Umgebungsinformationen und GNSS/IMU-DatenDie genaue Bestimmung der Position von Fahrzeugen ist nicht nur für autonomes Fahren, sondern auch für viele andere Anwendungen von entscheidender Bedeutung. Die bisherigen Technologien, wie globale Navigationssatellitensysteme (GNSS) oder inertiale Messeinheit (IMU), stoßen jedoch aufgrund von Störungen und Ungenauigkeiten, insbesondere in innerstädtischen Gebieten, an ihre Grenzen.Leitung: Hamza Alkhatib, Sören VogelTeam:Jahr: 2023Förderung: mFUND-Projekt | BMDV (Bundesministerium für Digitales und Verkehr)Laufzeit: 2023-2025
![]()
![]() © GIH
© GIH
-
Entwicklung eines kollaborativen robusten Partikelfilters zur Zustandsschätzung mit stochastischen und mengenbasierten Unsicherheiten in SensornetzwerkenEine präzise Fahrzeuglokalisierung ist eine wichtige Voraussetzung für autonomes Fahren, insbesondere in städtischen Umgebungen, in denen GNSS-Signale häufig ausfallen. Um diese Herausforderung zu meistern, schätzt ein fortschrittlicher Partikelfilter die Fahrzeugposition durch die Verschmelzung von 3D-LiDAR-Daten mit ergänzenden Sensoreingaben. Die Hauptmotivation besteht darin, trotz der Komplexität städtischer Umgebungen eine Lokalisierungsgenauigkeit von wenigen Dezimetern zu erreichen.Leitung: PD Dr.-Ing. Hamza AlkahtibTeam:Jahr: 2022Förderung: DFG - GRK 2159 i.c.sensLaufzeit: 11/2022 - 11/2025
![]()
![]()
-
port_AI – Ein volldigitaler Zwilling für Hafenbauwerke unter Nutzung von IoT, 5G, BIM, AR- und KI-Verfahren zum Aufbau eines smarten Building-Lifecycle-ManagementsDie Anforderungen an die Sicherheit und Zuverlässigkeit des Anlagenmanagements der Infrastrukturbauwerke im Bereich der See- und Binnenhäfen nehmen aufgrund des zunehmend globalisierten Handels stetig zu. Durch die Schaffung einer Smart-Infrastructure sollen in diesem Projekt verschiedene Herausforderungen im Umfeld des Managements bestehender Hafeninfrastruktur gelöst werden. Auch die Digitalisierung sowie der Einsatz von KI Verfahren sind im Rahmen dieses Projektes unter dem Begriff der Smart-Infrastructure subsummiert. Nur ein durchgreifend digitales Management von Hafeninfrastruktur ermöglicht den sparsamen Einsatz von Ressourcen, eine vorausschauende Instandsetzung, frühzeitige sowie umfassende Schadenserkennungen und –bewertungen. Dies kann zu einer erheblichen Kosteneinsparungen führen.Leitung: Ingo Neumann, Hamza Alkhatib, Mohammad OmidalizarandiTeam:Jahr: 2021Förderung: Förderprogramm für Innovative Hafentechnologien (IHATEC) unterstützt durch das Bundesministerium für Verkehr und digitale Infrastruktur (BMVI)Laufzeit: 12/2021 – 02/2025
![]()
![]()
-
Messsystemanalyse und modelbasierte Sensorfusion für das hydro-graphische Wasserwechselzonenmonitoring mittels unbemannter TrägersystemeZiel des Projektes „Messsystemanalyse und modelbasierte Sensorfusion für das hydrographische Wasserwechselzonenmonitoring mittels unbemannter Trägersysteme (WaMUT)“, welches das GIH in Zusammenarbeit mit der Auftraggeberin, der Bundesanstalt für Gewässerkunde (BfG) bearbeitet, ist die konsistente, qualitätsgesicherte Erfassung und Modellierung von Geobasisdaten der Wasserwechselzonen und Flachwasserbereiche der Bundeswasserstraßen zur Qualitätssteigerung – insbesondere kleinräumiger - digitaler Geländemodelle des Wasserverlaufs. Im Gegensatz zu den klassischen geodätischen Beobachtungsverfahren zur Erfassung der Bathymetrie und Topographie rückt in den letzten Jahren die Nutzung unbemannter Sensorplattformen – vor allem landseitig (unmanned aerial vehicle UAV), aber auch auf dem Wasser (unmanned surface vessel USV) – in den Fokus. Diese Messsysteme sollen im Rahmen des Projektes WaMUT validiert und darauf aufbauend ein qualitätsgesichertes, integriertes Messprogramm erstellt werden, um belastbare Geobasisdaten in den Wasserwechselzonen erfassen zu können.Leitung: Ingo Neumann, Hamza AlkhatibTeam:Jahr: 2020Laufzeit: 09/2020 - 08/2024
![]()
![]() © BfG
© BfG
-
3D HydroMapperIm Rahmen des Verbundprojektes wird ein Messsystem zur Erfassung von Hafenbauwerken entwickelt. Ziel ist es, die Bausubstanz über und unter Wasser möglichst automatisiert, qualitätsgesichert und reproduzierbar mit einem hybriden Multi-Sensor-System zu erfassen. Die Bauwerksschäden sollen mittels Mustererkennungsmethoden automatisch erkannt und klassifiziert werden.Leitung: Ingo Neumann, Hamza AlkhatibTeam:Jahr: 2018Förderung: Förderprogramm für Innovative Hafentechnologien (IHATEC) unterstützt durch das Bundesministerium für Verkehr und digitale Infrastruktur (BMVI)Laufzeit: 12/2018 - 11/2021
![]()
![]()
-
Bayesian adaptive robust adjustment of multivariate geodetic measurement processes with data gaps and nonstationary colored noiseThis research field aims at the development of a unified robust adjustment theory and of corresponding computationally efficient expectation maximization (EM) algorithms to handle outliers, data gaps, colored noise and cross-correlations within geodetic measurement series simultaneously. Various kinds of stationary and nonstationary Gauss-Markov models are investigated (see the figure below). To include given prior information for the unknown parameters, Bayesian models and inferential techniques are also devised. Applications include the geo-referencing of a static multi-sensor system and deformation monitoring of an arch bridge.Leitung: Boris Kargoll, Hamza Alkhatib, Jens-André PaffenholzTeam:Jahr: 2018Förderung: DFGLaufzeit: 2018-2021
![]()
![]()
-
Analysis of the correlation structure of TLS point cloudsAn improved stochastic model for TLS observations is of main importance, particularly when the observations are used in least-squares adjustment. Indeed, the best unbiased estimates of unknown parameters in linear models have the smallest expected meansquared errors as long as the residuals are weighted with their true variance covariance matrix.Team:Jahr: 2018Laufzeit: since 2018
![]()
![]()
-
Influence of the uncertainty budget on B-Spline curve estimationIn order to guarantee the quality of a freeform curve and to get more meaningful analysis results, it is essential to be aware of all uncertainties resources and their impact on the estimation. In this work, a more sophisticated uncertainty budget is considered, that contributes to a refined covariance matrix. Uncertainties are modelled and propagated according to the “Guide to the Expression of Uncertainty in Measurements (GUM)”. Furthermore, control points of B-Spline curves are estimated by means of the least-squares methods based on the refined VCM. Comparison have been made between the B-Spline curves using identity and refined weight matrix, which reflects that the uncertainty influence within the estimation cannot be neglected for high quality results.Leitung: Ingo Neumann, Boris Kargoll, Hamza AlkhatibTeam:Jahr: 2017Laufzeit: 2017 - 2019
![]()
![]()
-
Immobilienbewertung in kaufpreisarmen Lagen durch ein robustes bayesisches hedonisches ModellDie üblichen Verfahren der Immobilienbewertung funktionieren insb. dann sehr gut, wenn viele Informationen aus den Teilmärkten vorliegen. Dort werden im Rahmen eines Vergleichswert-verfahrens regelmäßig statistische Verfahren eingesetzt (hedonische Verfahren, z. B. Regressionsanalyse), um den Verkehrswert abzuleiten. In Gebieten mit wenigen Kauffällen wird die klassische statistische Auswertung nur unzuverlässige Ergebnisse liefern oder nicht anwendbar sein, da diese geeignete Stichprobengrößen erfordern.Leitung: Hamza AlkhatibTeam:Jahr: 2015Förderung: DFGLaufzeit: 02/2015 - 03/2018
![]()
![]()
-
Bayesische Verfahren zur Ermittlung von Verkehrswerten in kaufpreisarmen LagenDas Vergleichswertverfahren hat sich als marktnächstes Verfahren als sehr praktikabel in der Immobilienbewertung etabliert. Allerdings bedarf es, wie alle statistischen Methoden, einer geeigneten Stichprobengröße: normalerweise werden 15 Kauffälle pro unabhängige Variable in einer Regressionsanalyse benötigt. In Gebieten mit wenigen Kauffällen stehen den Sachverständigen oft nur sehr wenige Kauffälle zur Verfügung (z. B. 10 bis 30 Kauffälle/Teilmarkt). Er oder sie schätzt den Wert durch seine oder ihre Erfahrung unter Berücksichtigung dieser wenigen Information ab. In diesem Fall wird die klassische statistische Auswertung nur unzuverlässige Ergebnisse liefern oder nicht möglich sein.Team:Jahr: 2012
![]()
![]()
-
Alternative Verfahren zur Modellierung von Unsicherheiten in ingenieurgeodätischen ProzessenIm Guide to the Expression of Uncertainty (GUM) wird eine Unterteilung der Unsicherheiten in zufällig und systematisch wirkende Einflüsse vorgeschlagen. Im Rahmen dieses Projekts sollen insbesondere die systematischen Unsicherheiten mit Hilfe von Fuzzy-, Bayes- und Monte Carlo-Verfahren ermittelt werden. In diesem Zusammenhang werden Laserscanning- und Wertermittlungsdaten untersucht.Leitung: Hamza Alkhatib, Ingo NeumannTeam:Jahr: 2009Laufzeit: seit 2009
![]()
![]()
-
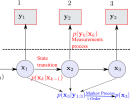
Bayes‘sche/Monte Carlo Modellierung geodätischer ProzesseIn vielen Anwendungsgebieten der Geodäsie wird die optimale Schätzung des Zustandes eines Systems benötigt, der sich über ein bestimmtes Zeitintervall verändert und gemessen wird. Dazu werden verschiedene Gleichungen (System- und Messgleichungen) zur Modellierung des Systemzustandes aufgestellt. Die rekursive Schätzung des Systemzustandes wird in der Literatur als Filterung im Zustandsraum bezeichnet.Team:Jahr: 2008Laufzeit: 2008 - 2014
![]()
![]()
Forschungsprojekte von Dr.-Ing. Hamza Alkhatib


















Letzte Änderung: 19.03.25





