
An Efficient Assignment Approach for Position Tracking Using LiDAR Point Clouds
 © GIH
© GIH
| Led by: | Rozhin Moftizadeh, Dominik Ernst, Hamza Alkhatib |
| E-Mail: | moftizadeh@gih.uni-hannover.de |
| Team: | Zhang Meng |
| Year: | 2024 |
| Date: | 01-12-23 |
| Duration: | 01/2024 – 06/2024 |
| Is Finished: | yes |
Background
Georeferencing multi-sensor-systems (MSSs) in urban environments is a challenging topic that has gained considerable interest in the last decades. In such environments, the global navigation satellite systems (GNSS) data may not be available or reliable enough due to the existing infrastructure. Also, the inertial measurement units (IMUs) are subject to drift over time. To overcome the shortcomings of GNSS and IMU, additional sensors can be used to provide a reliable georeferencing solution.
In this Master Thesis the use of light detection and ranging (LiDAR) data is the main focus. By using such data, the available information from the surrounding infrastructures can be used, which in turn can lead to improved georeferencing solutions.
Objectives
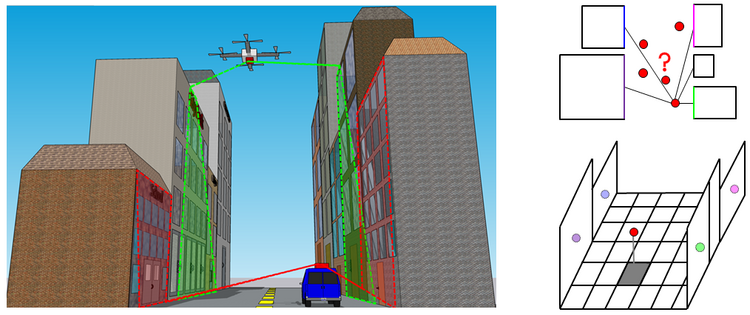
The primary idea is to minimize the distances between the transformed LiDAR point clouds to the surrounding infrastructure. For this purpose, using the six degrees of freedom (6-DoF) of the MSS in each epoch, these data should be transformed into the global coordinate system. Then they should be assigned to the existing buildings in the environment.
The goal of this Master Thesis is to develop an efficient assignment approach that can correctly detect the captured buildings or other infrastructure in each epoch.
Specific Methodology
In this Master Thesis, a filtering framework is used to solve the georeferencing problem. Therefore, the developed assignment approach should be used in the context of filtering methodologies. This is split into two parts. In a first step, a representation of map information has to be created from provided point clouds of the environment. In the second part, the assignment of point clouds to these models should be implemented in an efficient manner.
Provided Material
The material provided to the candidate includes some relevant literature to help understand the problem and give a broad overview of the available methodologies in this area. Moreover, a pre-programmed filtering approach that includes an assignment approach based on the level of detail 2 (LoD-2) 3D city models. Finally, a real data set from a measurement campaign carried out in the i.c.sens Research Training Group.
Programming Language
The MATLAB programming language must be used for the final product of this thesis. Therefore, the candidate is required to have sufficient knowledge in MATLAB. Programming skills in Python are also encouraged.





