
Advanced Particle Filter-Based V2V Collaborative Localisation in Urban Environments
 © GIH
© GIH
| Led by: | PD Dr.-Ing. Hamza Alkhatib, Marvin Scherff, M. Sc. |
| Year: | 2025 |
Advanced Particle Filter-Based V2V Collaborative Localisation in Urban Environments
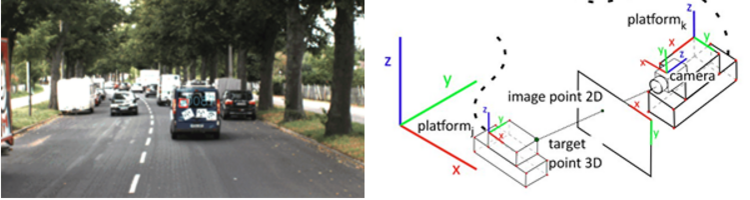
Background: Urban environments pose significant challenges for autonomous vehicle localisation due to dynamic conditions, lack of reliable GNSS position information and limited map-based guidance provided by LiDAR scan matching. To address this limitation, a collaborative localisation approach is proposed, leveraging a stereo camera setup to detect respective platform calibrated markers on the rear of leading vehicles. This cooperative strategy enables the enhancement of positional accuracy – particularly for the longitudinal direction - by integrating data from multiple traffic agents. An advanced particle filter is employed to fuse sensor inputs, ensuring robust and reliable localisation in complex urban scenarios.
Objective: This master thesis aims to develop and integrate a reliable Vehicle-to-Vehicle (V2V) collaboration approach into an existing Particle Filter framework. By incorporating the uncertainty information of leading vehicles, the method seeks to accurately quantify the filtered ego-vehicle's pose. The primary objective is to minimize longitudinal deviations, particularly in feature-poor environments, where current methods experience significant pose disturbances. Ultimately, this module aims to enhance localization robustness and accuracy in challenging urban scenarios.
Specific Methodology:
Data Preparation:
- Filter misdetections in real-world image sequences.
- Estimate the stochastic model of the marker detection algorithm.
- Format data for compatibility with the particle filter framework.
Collaborative Implementation:
- Develop and experimentally validate a stereo camera-based collaboration approach.
- Incorporate uncertainty information from aiding vehicles.
- Integrate LiDAR scans for long-distance support if beneficial.
Evaluation:
- Perform Monte Carlo simulations to assess performance.
- Run a standard filter for the aiding vehicle to estimate poses.
- Use aiding vehicle poses for ego-vehicle collaborative localization and analyse results
Programming Requirement:
MATLAB: Proficiency is essential for integrating the collaboration module into the particle filter framework.
Python: Required for image sequence analysis, implementing collaboration concepts, and conducting extensive evaluations.





