Projekte | Expertengestützte Datenanalyse und Qualitätsprozesse
-
port_AI – Ein volldigitaler Zwilling für Hafenbauwerke unter Nutzung von IoT, 5G, BIM, AR- und KI-Verfahren zum Aufbau eines smarten Building-Lifecycle-ManagementsDie Anforderungen an die Sicherheit und Zuverlässigkeit des Anlagenmanagements der Infrastrukturbauwerke im Bereich der See- und Binnenhäfen nehmen aufgrund des zunehmend globalisierten Handels stetig zu. Durch die Schaffung einer Smart-Infrastructure sollen in diesem Projekt verschiedene Herausforderungen im Umfeld des Managements bestehender Hafeninfrastruktur gelöst werden. Auch die Digitalisierung sowie der Einsatz von KI Verfahren sind im Rahmen dieses Projektes unter dem Begriff der Smart-Infrastructure subsummiert. Nur ein durchgreifend digitales Management von Hafeninfrastruktur ermöglicht den sparsamen Einsatz von Ressourcen, eine vorausschauende Instandsetzung, frühzeitige sowie umfassende Schadenserkennungen und –bewertungen. Dies kann zu einer erheblichen Kosteneinsparungen führen.Leitung: Ingo Neumann, Hamza Alkhatib, Mohammad OmidalizarandiTeam:Jahr: 2021Förderung: Förderprogramm für Innovative Hafentechnologien (IHATEC) unterstützt durch das Bundesministerium für Verkehr und digitale Infrastruktur (BMVI)Laufzeit: 12/2021 – 02/2025
![]()
![]()
-
Integrity contained navigation based on vehicle data and constrained collaborative informationMulti-Sensor System (MSS) georeferencing is a challenging task in engineering which should be dealt with in the most accurate way possible. An example of a MSS is an autonomous car which drives through an environment and should be able to locate itself safely. The easiest and most straightforward way of georeferencing is to rely on the Global Navigation Satellite System (GNSS) and Inertial Measurement Unit (IMU) data. However, at indoor environments or crowded inner-city areas, such data lack enough accuracy to be entirely relied on. Therefore, appropriate filtering algorithms are required to compensate for such errors and to improve the results sufficiently. Sometimes it is also possible to increase the functionality of a filtering technique by engaging additional complementary information which can directly influence the outputs. Such information could be e.g. geometrical features of the environment in which the MSS runs through.Leitung: Ingo NeumannTeam:Jahr: 2020Förderung: DFG-Graduiertenkolleg i.c.sensLaufzeit: seit 2020
![]()
![]()
-
Messsystemanalyse und modelbasierte Sensorfusion für das hydro-graphische Wasserwechselzonenmonitoring mittels unbemannter TrägersystemeZiel des Projektes „Messsystemanalyse und modelbasierte Sensorfusion für das hydrographische Wasserwechselzonenmonitoring mittels unbemannter Trägersysteme (WaMUT)“, welches das GIH in Zusammenarbeit mit der Auftraggeberin, der Bundesanstalt für Gewässerkunde (BfG) bearbeitet, ist die konsistente, qualitätsgesicherte Erfassung und Modellierung von Geobasisdaten der Wasserwechselzonen und Flachwasserbereiche der Bundeswasserstraßen zur Qualitätssteigerung – insbesondere kleinräumiger - digitaler Geländemodelle des Wasserverlaufs. Im Gegensatz zu den klassischen geodätischen Beobachtungsverfahren zur Erfassung der Bathymetrie und Topographie rückt in den letzten Jahren die Nutzung unbemannter Sensorplattformen – vor allem landseitig (unmanned aerial vehicle UAV), aber auch auf dem Wasser (unmanned surface vessel USV) – in den Fokus. Diese Messsysteme sollen im Rahmen des Projektes WaMUT validiert und darauf aufbauend ein qualitätsgesichertes, integriertes Messprogramm erstellt werden, um belastbare Geobasisdaten in den Wasserwechselzonen erfassen zu können.Leitung: Ingo Neumann, Hamza AlkhatibTeam:Jahr: 2020Laufzeit: 09/2020 - 08/2024
![]()
![]() © BfG
© BfG
-
Validation and quality assurance concepts for collaborative multi-sensor-systemsThe collaboration of several multi-sensor systems (MSS) has the potential to compensate individual shortcomings, e.g. by sharing navigational information among the nodes of a dynamic sensor network. Within the context of autonomous driving knowledge of the quality of the collected data and the derived trajectory is of great importance. Therefore, uncertainty modelling and propagation is a crucial issue - starting from the single sensors along the entire process chain (e.g. including the calibration and synchronization of the sensors within each MSS) up to the resulting products like 3D mapping information of the environment and the trajectory of the MSS. Numerous investigations deal with more or less specific aspects of the quality assurance of an MSS. Within this doctoral project the focus lies on the quality modelling of the MSS under investigation by the research training group (RTG). Building on this, the gain by the collaboration of MSS for the uncertainty can be evaluated in a subsequent project.Leitung: Ingo NeumannTeam:Jahr: 2019
-
Bayesian adaptive robust adjustment of multivariate geodetic measurement processes with data gaps and nonstationary colored noiseThis research field aims at the development of a unified robust adjustment theory and of corresponding computationally efficient expectation maximization (EM) algorithms to handle outliers, data gaps, colored noise and cross-correlations within geodetic measurement series simultaneously. Various kinds of stationary and nonstationary Gauss-Markov models are investigated (see the figure below). To include given prior information for the unknown parameters, Bayesian models and inferential techniques are also devised. Applications include the geo-referencing of a static multi-sensor system and deformation monitoring of an arch bridge.Leitung: Boris Kargoll, Hamza Alkhatib, Jens-André PaffenholzTeam:Jahr: 2018Förderung: DFGLaufzeit: 2018-2021
![]()
![]()
-
3D HydroMapperIm Rahmen des Verbundprojektes wird ein Messsystem zur Erfassung von Hafenbauwerken entwickelt. Ziel ist es, die Bausubstanz über und unter Wasser möglichst automatisiert, qualitätsgesichert und reproduzierbar mit einem hybriden Multi-Sensor-System zu erfassen. Die Bauwerksschäden sollen mittels Mustererkennungsmethoden automatisch erkannt und klassifiziert werden.Leitung: Ingo Neumann, Hamza AlkhatibTeam:Jahr: 2018Förderung: Förderprogramm für Innovative Hafentechnologien (IHATEC) unterstützt durch das Bundesministerium für Verkehr und digitale Infrastruktur (BMVI)Laufzeit: 12/2018 - 11/2021
![]()
![]()
-
Analysis of the correlation structure of TLS point cloudsAn improved stochastic model for TLS observations is of main importance, particularly when the observations are used in least-squares adjustment. Indeed, the best unbiased estimates of unknown parameters in linear models have the smallest expected meansquared errors as long as the residuals are weighted with their true variance covariance matrix.Team:Jahr: 2018Laufzeit: since 2018
![]()
![]()
-
Integre informationsbasierte GeoreferenzierungSowohl innerhalb geschlossener Räumlichkeiten mit komplexen räumlichen Strukturen (z.B. Bürogebäude) als auch in städtischen Umgebungen, mit einer Vielzahl an höheren Gebäuden, ist eine integre Georeferenzierung von kinematischen Multi-Sensor-Systemen (MSS) nur höchst aufwendig zu realisieren, da u.a. genaue und zuverlässige GNSS-Beobachtungen aufgrund von Abschattungen nicht zur Verfügung stehen. Echtzeitprozessierung oder hohe Genauigkeitsansprüche werden so nur sehr schwer erreicht.Leitung: Ingo NeumannTeam:Jahr: 2017Förderung: DFG-Graduiertenkolleg i.c.sensLaufzeit: seit 2017
![]()
![]()
-
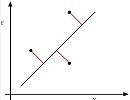
Influence of the uncertainty budget on B-Spline curve estimationIn order to guarantee the quality of a freeform curve and to get more meaningful analysis results, it is essential to be aware of all uncertainties resources and their impact on the estimation. In this work, a more sophisticated uncertainty budget is considered, that contributes to a refined covariance matrix. Uncertainties are modelled and propagated according to the “Guide to the Expression of Uncertainty in Measurements (GUM)”. Furthermore, control points of B-Spline curves are estimated by means of the least-squares methods based on the refined VCM. Comparison have been made between the B-Spline curves using identity and refined weight matrix, which reflects that the uncertainty influence within the estimation cannot be neglected for high quality results.Leitung: Ingo Neumann, Boris Kargoll, Hamza AlkhatibTeam:Jahr: 2017Laufzeit: 2017 - 2019
![]()
![]()
-
Set-membership Kalman filter and its applicationsState estimation is applicable to virtually all areas of engineering and science. Any discipline that is concerned with the mathematical modelling of its systems is a likely candidate for state estimation. Nonlinear filtering can be a difficult and complex subject in the field of state estimation. Developed in the past hundreds years, the stochastic state estimation techniques are most widely applied in the real world. This approach bases on the probabilistic assumptions of the uncertainties in the system, such as Kalman filter and extended Kalman filter, where uncertain parts (usually noise) in the system are assumed to have certain probability distribution (usually Gaussian distribution).Leitung: Ingo NeumannTeam:Jahr: 2017Förderung: DFG-Graduiertenkolleg i.c.sensLaufzeit: 2017 - 2019
![]()
![]()
-
Immobilienbewertung in kaufpreisarmen Lagen durch ein robustes bayesisches hedonisches ModellDie üblichen Verfahren der Immobilienbewertung funktionieren insb. dann sehr gut, wenn viele Informationen aus den Teilmärkten vorliegen. Dort werden im Rahmen eines Vergleichswert-verfahrens regelmäßig statistische Verfahren eingesetzt (hedonische Verfahren, z. B. Regressionsanalyse), um den Verkehrswert abzuleiten. In Gebieten mit wenigen Kauffällen wird die klassische statistische Auswertung nur unzuverlässige Ergebnisse liefern oder nicht anwendbar sein, da diese geeignete Stichprobengrößen erfordern.Leitung: Hamza AlkhatibTeam:Jahr: 2015Förderung: DFGLaufzeit: 02/2015 - 03/2018
![]()
![]()
-
Bayesische Verfahren zur Ermittlung von Verkehrswerten in kaufpreisarmen LagenDas Vergleichswertverfahren hat sich als marktnächstes Verfahren als sehr praktikabel in der Immobilienbewertung etabliert. Allerdings bedarf es, wie alle statistischen Methoden, einer geeigneten Stichprobengröße: normalerweise werden 15 Kauffälle pro unabhängige Variable in einer Regressionsanalyse benötigt. In Gebieten mit wenigen Kauffällen stehen den Sachverständigen oft nur sehr wenige Kauffälle zur Verfügung (z. B. 10 bis 30 Kauffälle/Teilmarkt). Er oder sie schätzt den Wert durch seine oder ihre Erfahrung unter Berücksichtigung dieser wenigen Information ab. In diesem Fall wird die klassische statistische Auswertung nur unzuverlässige Ergebnisse liefern oder nicht möglich sein.Team:Jahr: 2012
![]()
![]()
-
Steuerung und Optimierung von Messprozessen durch die Berücksichtigung von Kostenfunktionen (Risk Minimization in Structural Safty Monitoring)One main goal of structural safety monitoring is minimizing the risk of un-expected collapses of artificial objects and geologic hazards. Behind these activities in the DFG founded project, it is the need of the society in mini-mizing the negative environmental impacts. An optimal configuration for measurement setups and all other decisions shall therefore review and ra-te the risks of an individual monitoring project. Nowadays, the methodolo-gy in many engineering disciplines and mathematically founded decisions are usually based on probabilities and significance levels but not on the risk (consequences or costs) itself.Leitung: Ingo NeumannTeam:Jahr: 2011Förderung: DFGLaufzeit: 09/2011 - 08/2014
![]()
![]()
-
Qualitätsbeschreibung in ingenieurgeodätischen SensornetzenDurch Sensornetzstrukturen eingeführte Kommunikationswege ermöglichen einen frühzeitigen Informationsaustausch und damit eine prozessbegleitende Qualitätsbeurteilung in der Ingenieurgeodäsie. Weiterhin stellen die neuen Kommunikationsmöglichkeiten gegebenenfalls Zusatzinformationen bereit, die für die Beurteilung von Qualitätsmerkmalen berücksichtigt werden müssen.Team:Jahr: 2010Laufzeit: 2010 - 2014
![]()
![]()
-
Simulationsbasierte Optimierung tachymetrischer NetzmessungenIn geodätischen Netzen großer Ausdehnung oder mit einer Vielzahl von Punkten ist die tachymetrische Netzmessung meist mit einem hohen logistischen Aufwand verbunden. Die einzelnen Messpunkte müssen immer wieder angefahren werden, um die Reflektoren zum aktuellen Tachymeterstandpunkt auszurichten. Die effiziente Planung der Messung hat das Ziel, möglichst geringe Kosten zu verursachen oder sie strebt eine möglichst geringe Messdauer an.Team:Jahr: 2010Laufzeit: 2010 - 2019
![]()
![]()
-
Alternative Verfahren zur Modellierung von Unsicherheiten in ingenieurgeodätischen ProzessenIm Guide to the Expression of Uncertainty (GUM) wird eine Unterteilung der Unsicherheiten in zufällig und systematisch wirkende Einflüsse vorgeschlagen. Im Rahmen dieses Projekts sollen insbesondere die systematischen Unsicherheiten mit Hilfe von Fuzzy-, Bayes- und Monte Carlo-Verfahren ermittelt werden. In diesem Zusammenhang werden Laserscanning- und Wertermittlungsdaten untersucht.Leitung: Hamza Alkhatib, Ingo NeumannTeam:Jahr: 2009Laufzeit: seit 2009
![]()
![]()
-
Effizienzoptimierung ingenieurgeodätischer ProzesseDie Effizienzoptimierung von Mess- und Auswerteprozessen der Ingenieurgeodäsie setzt eine detaillierte Modellierung der einzelnen Teilschritte voraus. Realisiert wird diese Modellierung mittels Petri-Netzen, die Simulationen in computergestützten Systemen möglich machen. Zur Minimierung der Kosten oder Dauer der Messprozesse werden Genetische Algorithmen als Optimierungsverfahren verwendet.Leitung: Hansjörg KuttererTeam:Jahr: 2009Förderung: DFGLaufzeit: 05/2009 - 06/2014
![]()
![]()
-
Total least squaresObwohl sich die Auswertung in geodätischen Anwendungen häufig auf Methoden der kleinsten Quadrate bezieht, sollte das Gauss-Markov-Modell mit unsicherer Modellmatrix im mathematischen Sinne mit der Total-Least-Squares-Schätzung (TLS) ausgeglichen werden. Es ist bekannt, dass bereits viele Lösungen für die Berechnung der TLS in der Geodäsie und in anderen Wissenschaften existieren. Die Lösung im Falle einer allgemeinen Varianz-Kovarianz-Matrix steht allerdings noch aus.Team:Jahr: 2009
![]()
![]()
-
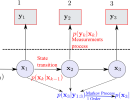
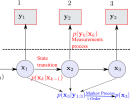
Bayes‘sche/Monte Carlo Modellierung geodätischer ProzesseIn vielen Anwendungsgebieten der Geodäsie wird die optimale Schätzung des Zustandes eines Systems benötigt, der sich über ein bestimmtes Zeitintervall verändert und gemessen wird. Dazu werden verschiedene Gleichungen (System- und Messgleichungen) zur Modellierung des Systemzustandes aufgestellt. Die rekursive Schätzung des Systemzustandes wird in der Literatur als Filterung im Zustandsraum bezeichnet.Team:Jahr: 2008Laufzeit: 2008 - 2014
![]()
![]()
-
Ingenieurgeodätische Sensornetze mit autonomer ReaktionsfähigkeitDer Einsatz von kommunikationsfähigen und vernetzten Sensoren in ingenieurgeodätischen Projekten ermöglicht, durch deren kooperatives Zusammenspiel, aus erfassten Parametern bzw. daraus abgeleiteten Informationen eine Bewertung von Ereignissen durchzuführen und eine entsprechende Reaktion einzuleiten.Team:Jahr: 2008Laufzeit: 2008 - 2014
![]()
![]()
-
Kombinierte Analyse und Validierung von Erdrotationsmodellen und BeobachtungenDurch geodynamische Prozesse verursachte Massenverlagerungen verändern die Rotationsachse, die Rotationsgeschwindigkeit und das Schwerefeld der Erde. Die Veränderungen der Rotation und des Schwerfeldes können gemessen werden. Zusätzlich werden die verursachende Prozesse durch Modelle beschrieben. Bisher wurden die Messwerte und Modelle unabhängig voneinander behandelt.Leitung: Hansjörg KuttererTeam:Jahr: 2006Förderung: DFGLaufzeit: 2006 - 2012
![]()
![]()
-
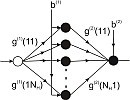
Modellierung und Analyse geodätischer Daten mit Künstlichen Neuronalen Netzen und Neuro-Fuzzy-VerfahrenDie Erfassung und Modellierung von Deformationsprozessen an großen Bauwerken ist eine Hauptaufgabe der Ingenieurgeodäsie. Deren Komplexität nimmt zu, wenn der Zusammenhang zwischen den beobachteten Einflussgrößen und den Deformationen nichtlinear ist. Für diesen Fall wird die Systemidentifikation mit Künstlichen Neuronalen Netzen (KNN) und dem Neuro-Fuzzy-Ansatz ANFIS vorgenommen.Leitung: Hansjörg KuttererTeam:Jahr: 2005
![]()
![]()