Laufende Studienarbeiten
-
Entwicklung und Validierung einer Simulationsumgebung für einen VierbeinroboterVierbeinroboter sind bekannt für ihre Stabilität und Vielseitigkeit in komplexem Gelände und haben zahlreiche Anwendungen, von Such- und Rettungseinsätzen bis zur Überwachung von Infrastrukturen oder zur landwirtschaftlichen Automatisierung. Ziel dieser Studienarbeit ist die Entwicklung einer realistischen Simulationsumgebung für unseren Vierbeinroboter am GIH, nämlich GeoPaw. Diese Umgebung nutzt das Robot Operating System (ROS) und integriert verschiedene Sensoren wie GNSS, IMU und LiDAR. Dadurch wird eine umfassende Bewertung und Weiterentwicklung der Roboterfähigkeiten ermöglicht, was zur Verbesserung von GeoPaw und Erweiterung seiner Einsatzmöglichkeiten beiträgt.Led by: Rozhin Moftizadeh, Hamza AlkhatibTeam:Year: 2024Duration: 07/2024 - 10/2024
![]()
![]()


Abgeschlossene Studienarbeiten
-
Punktwolken-Segmentierung zur effizienten Lokalisierung von Multi-Sensor-SystemenBei der Multi-Sensor-Fusion werden die Daten verschiedener Sensoren kombiniert, um die unterschiedlichen Schwächen der verschiedenen Sensoren auszugleichen und die Stärken zu nutzen. Neben IMUs und GNSS-Empfängern werden auch LiDAR-Sensoren (light detection and ranging) verbreitet eingesetzt, um die Positionierung und Umgebungswahrnehmung von Systemen zu realisieren und unterstützen. Als aktive Sensoren sind LiDARs geeignet, bei unterschiedlichen Beleuchtungsbedingungen Daten aufzuzeichnen.Led by: Sören Vogel, Dominik ErnstTeam:Year: 2023Duration: 02/2023 - 08/2023
![]()
![]() © Ernst
© Ernst
-
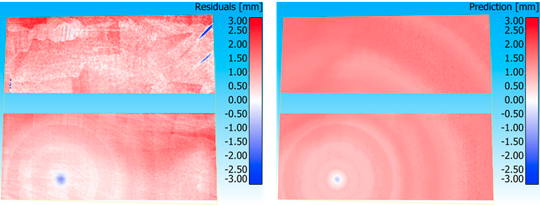
Uncertainty modelling of static laser scanning using deep learningModelling TLS-uncertainties using deep learningLed by: Jan Hartmann, Hamza AlkhatibTeam:Year: 2023Duration: 06/2023 – 12/2023
![]()
![]() © Hartmann
© Hartmann
-
Erweiterung eines Lidar-basierten Referenzmesssystem und Installation auf einem Test-FahrzeugDie Studienarbeit erfolgt in Kooperation mit IAV in Gaimersheim. In dieser Studienarbeit geht um die Erweiterung eines Referenzmesssystems für Fahrassistenzsysteme. Dabei soll ein bestehendes System um eine zweite Kamera erweitert werden, welche für die Datenfusion mit einem LiDAR verwenden werden soll. Dabei sollen die Echtzeitfähigkeit und die Kompatibilität der echtzeitfähigen Komponenten gewahrt werden.Led by: Dominik Ernst, Hamza AlkhatibTeam:Year: 2022Duration: 09/2021 - 04/2022
-
Simulation eines UAV-basierten Multi-Sensor-SystemsBei der Trajektorienschätzung von Fahrzeugen kann man die Genauigkeit der Ergebnisse durch mathematische Verfahren ableiten. Allerdings lässt sich die Richtigkeit der Ergebnisse nicht so einfach beurteilen. Eine Lösung besteht darin, die Ground Truth Trajektorie zu haben und durch den Vergleich mit der geschätzten Trajektorie die Korrektheit der Ergebnisse zu gewährleisten. Jedoch ist die Generierung der Ground Truth für ein reales Szenario, um die Funktionsfähigkeit eines mathematischen Algorithmus zu bewerten, nicht kosteneffizient und manchmal ist es auch nicht einfach und unkompliziert.Led by: Arman Khami und Sören VogelTeam:Year: 2022Duration: 04/2022 - 10/2022
![]()
![]()
-
Comparison of different measurement subsampling techniques in the localization of an autonomous multi-sensor-systemComparing various approaches to decrease the number of scanned data to be used for localizing multi-sensor-systems in an urban environment.Led by: Rozhin Moftizadeh, Hamza AlkhatibTeam:Year: 2022Duration: 05/2022 - 11/2022
![]()
![]() © Ernst
© Ernst
-
Automatisierung der Systemkalibrierung für LiDAR-basierte MultisensorplattformenLiDAR-Sensoren (light detection and ranging) finden in vielen Bereichen Anwendung. Durch die leichte Bauform sind LiDARs besonders für autonome Systeme geeignet. So werden die Sensoren für autonome Fahrzeuge zur Hinderniserkennung oder auch für UAVs (unmanned aerial vehicles) zur Aufzeichnung von Punktwolken als Unterstützung von Bilddaten eingesetzt. Auch im geodätischen Kontext finden LiDARs als kinematische Messsysteme immer größere Anwendung. Häufig werden dabei low-cost Laserscanner (LiDAR) eingesetzt. Um die bestmöglichen Ergebnisse mit diesen Sensoren zu erreichen, sind Kalibrierungen notwendig. Diese Kalibrierungen können in einer separaten Kalibrierumgebung erfolgen oder in-situ vor der Messung erfolgen.Led by: Sören Vogel, Dominik ErnstTeam:Year: 2022Duration: 10/2022 - 04/2023
![]()
![]() © Ernst
© Ernst
-
Implementation of Constraints in Extended Kalman Particle Filter for Georeferencing of Multi-Sensor-SystemsReliable georeferencing of a Multi-Sensor-System (MSS) is a challenging task, which comprises at least the accurate determination of three translation and three orientation parameters. With the help of GNSS and IMU measurements, this information can be gained directly in the object coordinate system. However, sometimes the information coming from the sensor might not be reliable enough or it might even be unavailable, especially in urban areas. Because of the high building, GNSS information is affected by signal occlusions. In order to increase the accuracy of georeferencing, appropriate filtering techniques should be applied.Led by: Rozhin Moftizadeh, Hamza AlkhatibTeam:Year: 2022Duration: 10/2023 - 04/2023
![]()
![]()
-
Implementation of Inversely Weighted Distance Subsampling Approach for Georeferencing of Multi-Sensor-Systems by Extended Kalman Particle FilterMulti-Sensor-System georeferencing is a challenging task when it comes to inner-city areas in which high-rise infrastructures avoid having reliable GNSS signals. On the other hand, the IMU data are usually subject to drifting over time. Therefore, suitable techniques should be used to compensate for the measurement errors of such sensors and hence to improve the reliability of the georeferencing solutions.Led by: Rozhin Moftizadeh, Hamza AlkhatibTeam:Year: 2022Duration: 10/2023 - 04/2023
![]()
![]()