
Analyse des Unilidar 4D LiDAR L1
 © GIH
© GIH
| Led by: | Christian Hartberger, M. Sc. |
| Year: | 2025 |
Analyse des Unilidar 4D LiDAR L1
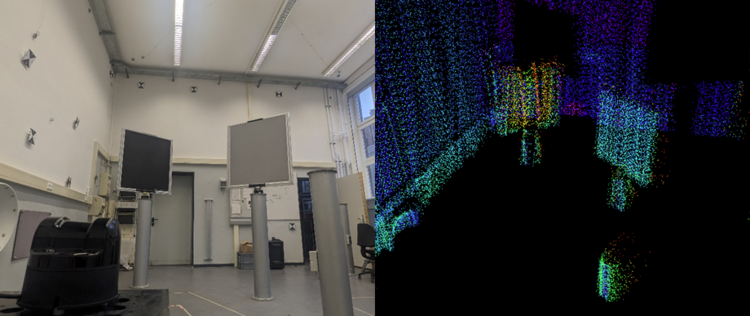
LiDAR-Sensoren sind im letzten Jahrzehnt deutlich im Preis gefallen, sodass sie bereits in Alltagsgegenständen, z.B. Saugrobotern, verbaut werden. Diese günstigen LIDAR-Sensoren können für mobile mapping leider nur begrenzt eingesetzt werden, da sie meist nur eine Ebene abtasten. Mit dem Unilidar 4D LiDAR L1 bietet sich die Möglichkeit eines großen volumetrischen Sichtfelds von 360°x90°. Um einschätzen zu können für welche Applikationen er sich eignet, bedarf es einer systematischen Analyse seiner Fähigkeiten in unterschiedlichen Umgebungen.
Ziel: Das Ziel dieser Bachelorarbeit ist die Analyse der Messunsicherheiten in Abhängigkeit der Distanzen und der Reflektivität von detektierten Objekten um ein besseres Verständnis über den Sensor zu erhalten und die erhaltenen Messwerte mit Unsicherheiten versehen zu können.
Methodik: Selbstständige Entwicklung eines Messversuchs, in dem verschiedene Einflüsse auf die Messunsicherheit erhoben werden sollen. Darunter u.a. die Distanz, Reflektivität und Auftreffwinkel von Objekten. Anschließend müssen diese Daten hinsichtlich ihrer Messunsicherheiten ausgewertet und verglichen werden.
Material: Der zu untersuchende Sensor wird mit Flächen mit bekannter Reflektivität und Geometrie für die Erhebung der Messdaten bereitgestellt.
Benötigte Programmierkenntnisse: Erweiterte Erfahrungen in Python oder MATLAB für die Analyse der Daten sind notwendig. Eines dieser Programme wird für die stochastische Datenanalyse und Datenpräsentation ausgiebig genutzt werden müssen. Erste Kenntnisse in ROS (Robot Operating System) sind wünschenswert, aber nicht zwingend notwendig.
Sprache: Deutsch oder Englisch





